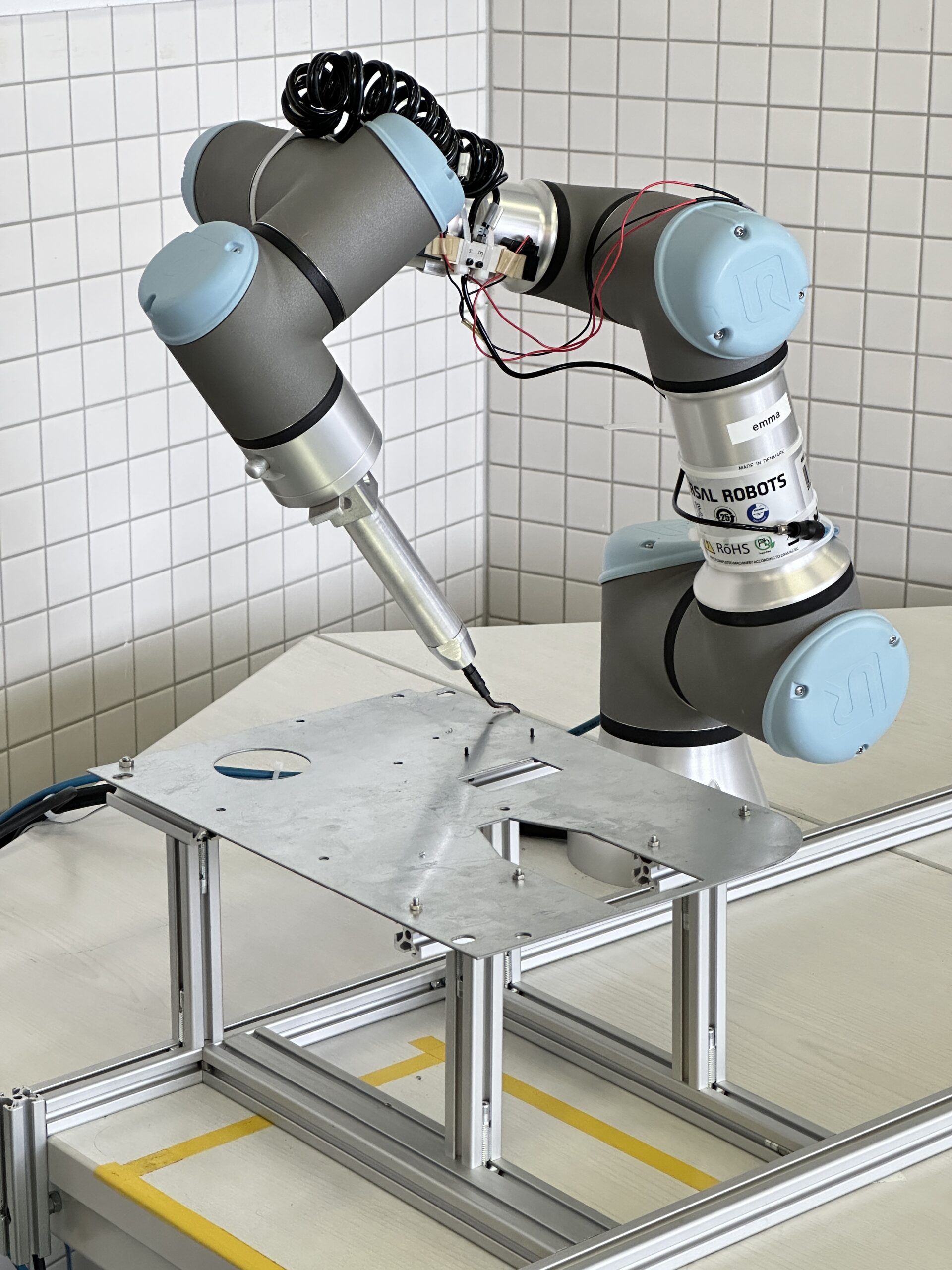
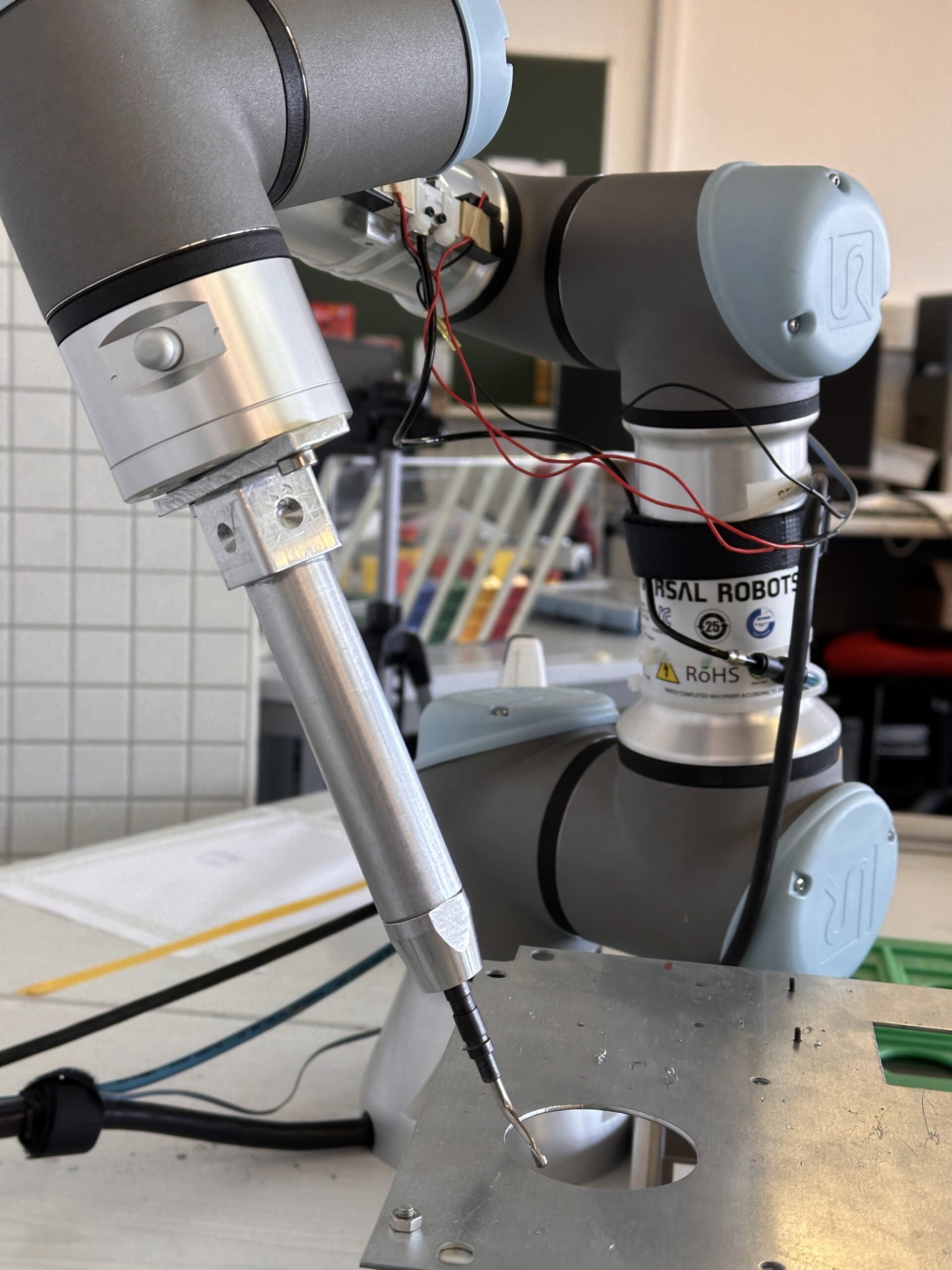
Das automatische Entgraten von Bauteilen wurde an der Hochschule Mittweida weiterentwickelt. Nach den ersten Versuchen, konnte in der nächsten Phase Experimente an Musterbauteilen der Firma Caleg fortgesetzt werden. Die Bauteile weisen verschiedene Bereiche zum Entgraten auf, darunter gerade Kanten, abgerundete Kanten und kreisförmige Löcher. Das kraftgesteuerte Entgraten komplexer Formen stellt besondere Herausforderungen dar.
Die größte Herausforderung besteht darin, eine gleichmäßige Kraft auf die Kante auszuüben. Bei geraden Kanten ist dies weniger problematisch, da sich der Roboter nur entlang einer Achse bewegt. Bei kreisförmigen Geometrien hingegen ändert sich die Kraftrichtung in Abhängigkeit von der TCP-(Tool Center Point) Position und dem Radius. Dies erfordert eine präzise Überwachung und Steuerung des Bewegungsverlaufs, da der Roboter in diesem Fall kraftgesteuert entlang zweier Achsen geregelt werden muss.
Eine alternative Lösung besteht darin, die Kraft entlang einer Achse festzulegen, während sich der TCP während der Bewegung dreht. Dabei muss die Geschwindigkeit der TCP-Bewegung in Abhängigkeit vom Radius des Kreises (sowohl Außen- als auch Innenradien) angepasst werden.
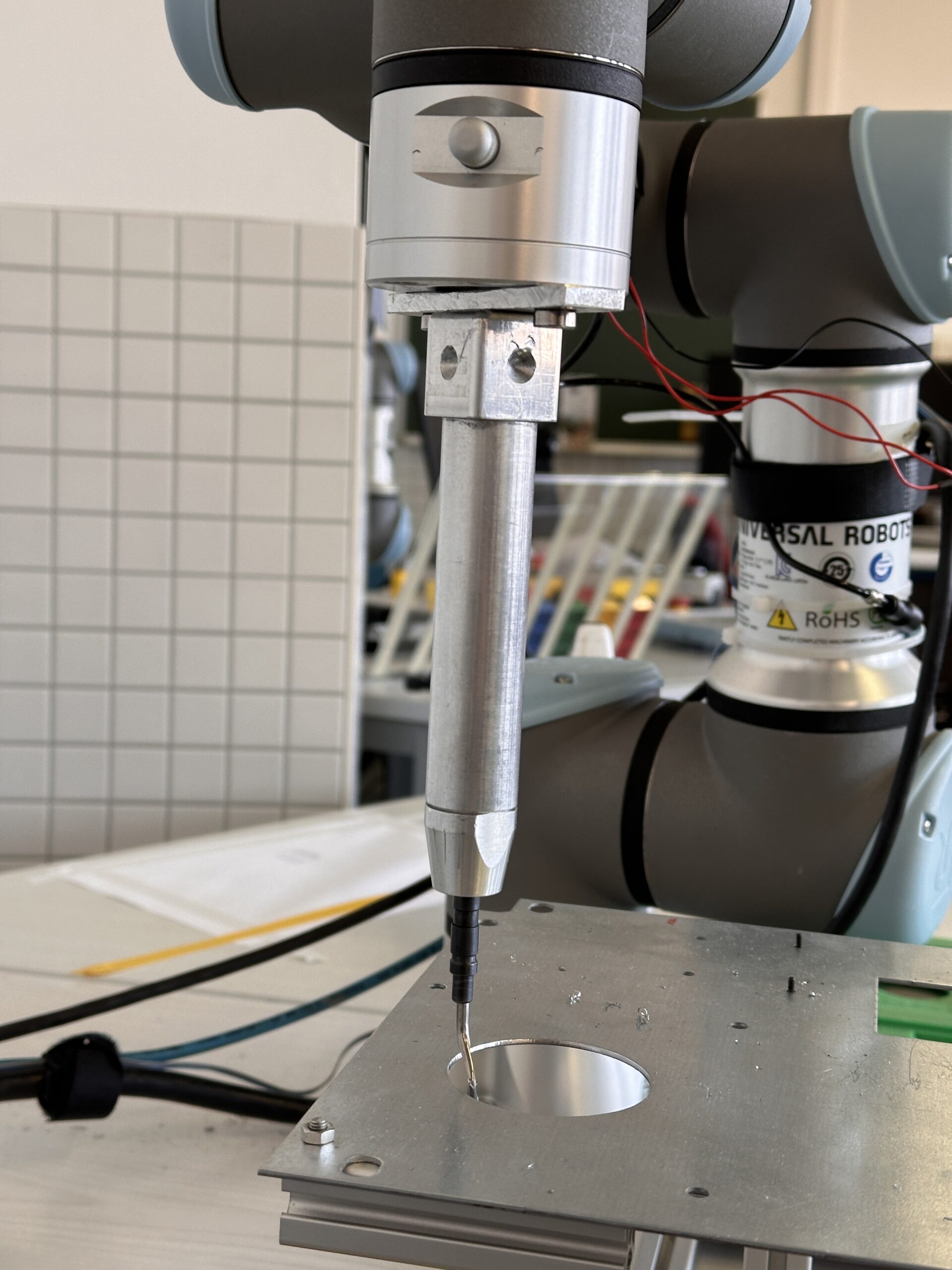
Zunächst wurde eine gerade Außenkante untersucht. Nach dem erfolgreichen Entgraten wurde die Methode auf weitere Geometrien, wie Innen- und Außenradien, angewendet. Des Weiteren wurde der Einfluss der schrägen Ausrichtung des Roboter-TCP auf das Entgraten untersucht. Ziel dieser schrägen Ausrichtung ist es, Entgratergebnisse zu erzielen, die mit der manuellen Bearbeitung durch den Menschen vergleichbar sind. Im Falle des geraden Entgratens ist die Ausrichtung des Werkzeugs relativ einfach, da die Kante gerade ist. Dies erfordert weniger komplexe Bewegungen des Entgratwerkzeugs oder der Entgratklinge. Die stabile Ausrichtung des Werkzeugs kann dazu beitragen, ein konsistentes Entgraten über die gesamte Länge der Kante zu gewährleisten. Durch das geneigte Entgraten hingegen kann der Grat in Bereichen entfernt werden, die beim geraden Entgraten möglicherweise schwerer zugänglich sind.
Außerdem wurde der Einsatz unterschiedlicher Entgratklingen analysiert. Zwei Entgratklingen aus HSS (High-Speed Steel) wurden gegenübergestellt: eine, die nur rechts einsetzbar ist, und eine andere, die sowohl rechts als auch links einsetzbar ist. Dabei wurden mit der zweiten Variante bessere Ergebnisse erzielt.
Derzeit wird an Bildverarbeitungsalgorithmen gearbeitet, die eine automatische Generierung von Roboterbahnen ermöglichen sollen. Hierbei werden Form- und Kantenerkennungsalgorithmen eingesetzt, um die Geometrien sowie deren Merkmale, wie Radius und Kantenlänge, zu extrahieren. Eine Tiefenkamera (Intel RealSense) liefert die notwendigen Tiefeninformationen. Basierend auf diesen Informationen lässt sich die Roboterbahn generieren, was zu einem automatisierten Entgraten führt.
Erfahren Sie mehr zum Praxisprojekt 3