Im Rahmen des Projekts PAL wird eine roboterbasierte Lösung zur automatisierten Entgratung entwickelt. Ziel ist es, manuelle Arbeitsschritte zu reduzieren und gleichzeitig eine hohe Bearbeitungsqualität sicherzustellen. Ein zentrales Teilvorhaben ist die Entwicklung eines innovativen 3D-Kantenerkennungssystems, das Technologien aus der Bildverarbeitung und Robotik kombiniert.
Für die Formerkennung wird dabei das Musterbauteil eines PAL-Industriepartners, der Firma Caleg, verwendet. Dieses Werkstück eignet sich aufgrund seiner vielfältigen Kanten und Konturen ideal zur Entwicklung und zum Testen automatisierter Entgratlösungen.
Die Visualisierung zeigt das Musterbauteil der Firma Caleg mit den automatisch erkannten Kanten und Formen. Die Klassifikation unterscheidet korrekt zwischen Kreisen, Polygonen und komplexen Geometrien. Zudem werden relevante Parameter wie Radien oder Eckpunktnummern eingeblendet. Dies demonstriert die Leistungsfähigkeit des Systems bei der geometrischen Analyse industrierelevanter Werkstücke.
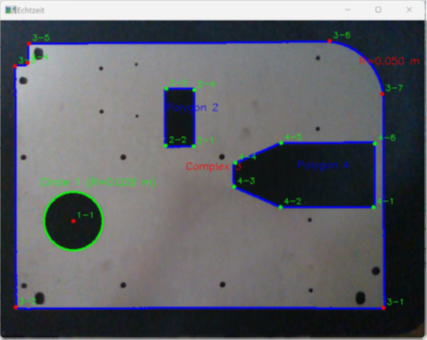
Musterbauteil der Firma Caleg
Im Rahmen des Projekts PAL wird eine roboterbasierte Lösung zur automatisierten Entgratung entwickelt. Ziel ist es, manuelle Arbeitsschritte zu reduzieren und gleichzeitig eine hohe Bearbeitungsqualität sicherzustellen. Ein zentrales Teilvorhaben ist die Entwicklung eines innovativen 3D-Kantenerkennungssystems, das Technologien aus der Bildverarbeitung und Robotik kombiniert.
Für die Formerkennung wird dabei das Musterbauteil eines PAL-Industriepartners, der Firma Caleg, verwendet. Dieses Werkstück eignet sich aufgrund seiner vielfältigen Kanten und Konturen ideal zur Entwicklung und zum Testen automatisierter Entgratlösungen.
Das System basiert auf einer Intel RealSense-Tiefenkamera, welche kontinuierlich dreidimensionale Aufnahmen der Werkstücke erstellt. Diese Tiefeninformationen werden in Echtzeit analysiert, um relevante Konturen, Kanten und Formen präzise zu identifizieren. Dadurch entsteht eine flexible und zuverlässige Grundlage für das Entgraten von Bauteilen mit komplexen und variierenden Geometrien.
Zur Rauschunterdrückung nutzt das System den DBSCAN-Algorithmus (Density-Based Spatial Clustering of Applications with Noise), ein Verfahren zur Gruppierung von Datenpunkten, das besonders robust gegenüber Ausreißern und verrauschten Messdaten ist. Die ermittelten Konturen durchlaufen anschließend eine Formklassifikation, die automatisch zwischen Kreisen, Polygonen und komplexen Strukturen unterscheidet. Dadurch kann der Roboter seine Bewegung an die jeweilige Bauteilgeometrie anpassen.
Kreise werden identifiziert, indem der kleinste umschließende Kreis berechnet und dessen Fläche mit der tatsächlichen Konturfläche verglichen wird. Polygone erkennt das System über eine dynamische Polygonapproximation, bei der unnötige Eckpunkte durch eine Winkelanalyse entfernt werden, um eine möglichst einfache, aber präzise Form zu erzeugen. Komplexe Formen, die nicht eindeutig als Kreis oder Polygon klassifizierbar sind, werden zusätzlich auf Kreisbögen untersucht. Hierzu analysiert das System fortlaufend jeweils drei aufeinanderfolgende Konturpunkte, um gekrümmte Abschnitte zu erkennen.
Wesentlich ist zudem die präzise räumliche Zuordnung der geometrischen Informationen zum Koordinatensystem des Roboters. Mithilfe sogenannter 3D-Koordinatentransformationen – mathematischer Verfahren zur exakten Anpassung von Position, Ausrichtung und Skalierung – werden die von der Kamera erfassten Geometriedaten in das Koordinatensystem des Roboters überführt. Dies ermöglicht eine präzise Abbildung der Werkstückposition im Arbeitsraum des Roboters. Diese genaue Umrechnung gewährleistet, dass die Roboterbewegungen exakt auf das reale Werkstück ausgerichtet sind.
Benutzerfreundliche grafische Benutzeroberfläche (GUI)
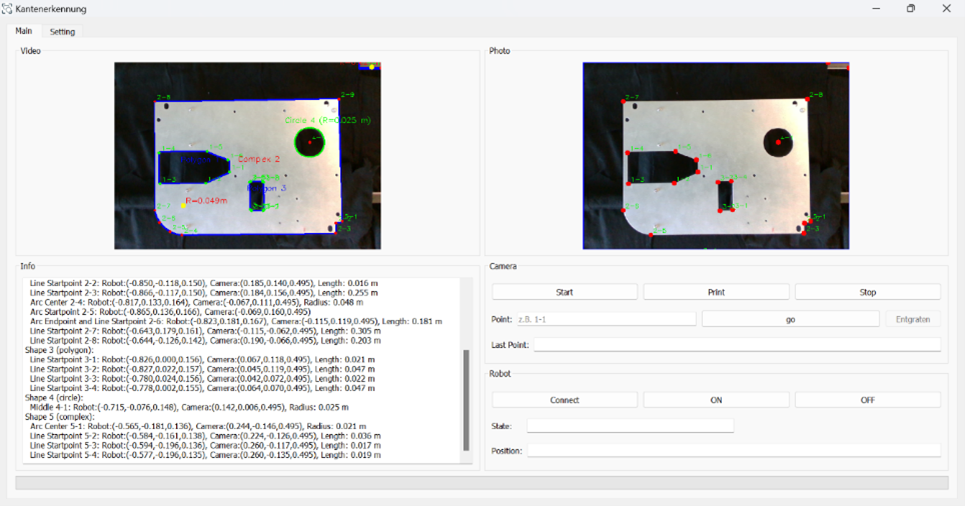
Zur intuitiven Steuerung wurde eine benutzerfreundliche grafische Benutzeroberfläche (GUI) entwickelt. Sie stellt die Ergebnisse der Kantenerkennung übersichtlich dar und erlaubt eine direkte Interaktion: Der Anwender kann durch Anklicken relevanter Punkte dem Roboter Steuerbefehle übermitteln, wodurch manuelle Programmierung entfällt.
Die Abbildung zeigt die entwickelte GUI, die eine zentrale Schnittstelle zwischen Kamera, Kantenerkennung und Robotersteuerung bildet. Im unteren Bereich werden alle relevanten Konturdaten inklusive ihrer Positionen im Roboter- und Kamerakoordinatensystem ausgegeben. Dies erlaubt eine direkte Steuerung des Roboters basierend auf den erkannten Merkmalen.
Die Kommunikation zwischen GUI und Roboter erfolgt über etablierte, TCP/IP-basierte Schnittstellen wie URScript (eine textbasierte Programmiersprache zur direkten Steuerung von UR-Robotern) und RTDE (Real-Time Data Exchange, ein Protokoll zur Übertragung von Echtzeitdaten). Diese Schnittstellen ermöglichen eine zuverlässige und reaktionsschnelle Steuerung. Die Steuerung wurde zunächst in der Simulationsumgebung URSim getestet und optimiert, bevor sie auf einem realen Cobot implementiert wurde. So konnten potenzielle Steuerungsfehler frühzeitig erkannt und behoben werden, was die Prozessstabilität deutlich erhöhte.
Im Rahmen des PAL-Projekts wurden bereits erste roboterbasierte Entgratprozesse untersucht und hinsichtlich ihrer Effektivität analysiert. Diese bestehenden Lösungen basieren jedoch auf festen, vorgegebenen Bahnen (Teach-in) und bieten nur begrenzte Flexibilität. Im nächsten Schritt soll die entwickelte kamerabasierte Formerkennung mit diesen bestehenden Prozessen zusammengeführt werden, um eine adaptive und vollautomatisierte Entgratlösung zu realisieren, die sich dynamisch an unterschiedliche Werkstückgeometrien anpassen kann.
Die Kombination aus leistungsfähigen Algorithmen, intuitiver Bedienung und effizienter Robotersteuerung stellt einen vielversprechenden Beitrag zur Weiterentwicklung im Rahmen von PAL dar und zeigt, wie moderne Robotik zur Verbesserung von Fertigungsprozessen eingesetzt werden kann.
Erfahren Sie mehr zum Praxisprojekt